
نصب موتور دانکر
موتورهای دانکر به دلیل ابعاد کوچک، کارایی بالا و قابلیت اطمینان، در کاربردهای متنوعی از جمله کرکرههای برقی، تجهیزات پزشکی و اتوماسیون صنعتی استفاده میشوند. موتور دانکر GR 63×25 براشدار و موتور دانکر GR 63×55 براشدار در بازار بیشتر مورد توجه قرار میگرد و استفاده ی بیشتری از ان میشود .نصب موتورهای دانکر (Dunker Motors) شامل سه مرحله اصلی است: نصب فیزیکی، سیمکشی، و پیکربندی کنترلر.
۱. نصب فیزیکی موتور دانکر
- موقعیتیابی: ابتدا باید محل دقیق نصب موتور دانکر را مشخص کنید. این موتورها معمولاً با استفاده از فلنج یا پایههای مخصوص روی سازه مورد نظر (مثل قاب کرکره یا شاسی دستگاه) محکم میشوند.
- تراز کردن: برای عملکرد صحیح و جلوگیری از لرزش، موتور باید به صورت کاملاً تراز نصب شود. مطمئن شوید که پیچها به خوبی سفت شدهاند تا موتور در جای خود ثابت بماند.
۲. سیمکشی
- اتصال به کنترلر: موتورهای دانکر موتورهای DC بدون جاروبک (BLDC) هستند و برای کار کردن حتماً به کنترلر نیاز دارند. سیمهای موتور (معمولاً شامل فاز، زمین و سیمهای انکودر) باید به درستی به پورتهای مربوطه روی کنترلر وصل شوند.
- منبع تغذیه: کنترلر نیز باید به منبع تغذیه مناسب (برق DC) متصل شود. ولتاژ منبع تغذیه باید با ولتاژ مورد نیاز موتور و کنترلر مطابقت داشته باشد.
۳. پیکربندی و راهاندازی
- نرمافزار کنترلر: بسیاری از کنترلرهای دانکر دارای نرمافزارهای مخصوصی هستند که از طریق کامپیوتر قابل برنامهریزی هستند. باید کنترلر را به کامپیوتر وصل کرده و نرمافزار را اجرا کنید.
- تنظیم پارامترها: در نرمافزار، پارامترهایی مانند سرعت، گشتاور، شتاب و جهت چرخش موتور را مطابق با نیاز پروژه خود تنظیم کنید. این مرحله برای عملکرد بهینه و ایمن موتور بسیار مهم است.
تست نهایی: پس از پیکربندی، موتور را در حالتهای مختلف تست کنید تا از عملکرد صحیح آن اطمینان حاصل شود مدل ممکن است جزئیات و الزامات خاص خود را داشته باشد.
نکته مهم: همیشه قبل از شروع به نصب موتور دانکر، دفترچه راهنمای مدل خاص موتور و کنترلر خود را به دقت مطالعه کنید.
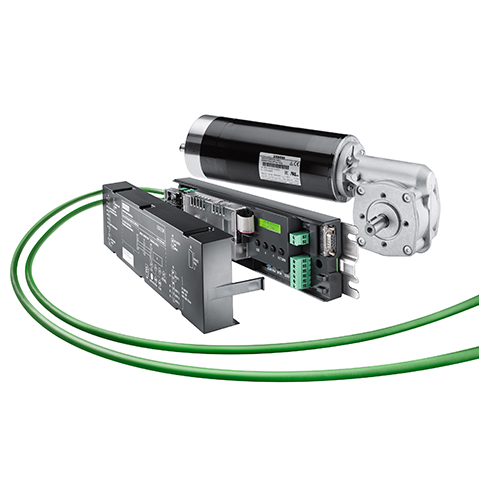
اجزای اصلی یک سیستم موتور دانکر
یک سیستم موتور دانکر معمولاً شامل سه جزء کلیدی است: موتور، انکودر (اختیاری) و کنترلر.
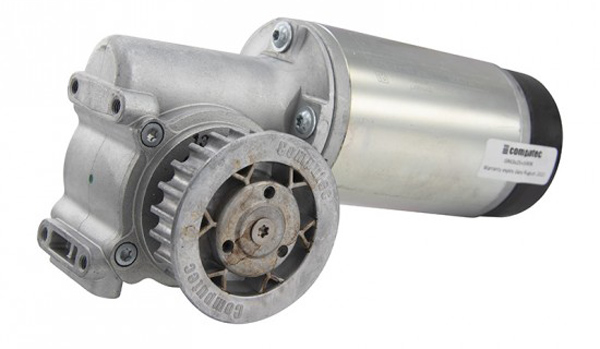
۱. موتور دانکر (Motor)
نوع موتور: بیشتر موتورهای دانکر از نوع براشلس DC (BLDC) هستند. این موتورها به دلیل عدم وجود جاروبک، عمر طولانیتر و کارایی بالاتری دارند و برای کاربردهای صنعتی بسیار مناسب هستند.
ویژگیها: در انتخاب موتور، به ولتاژ (مثلاً ۲۴ ولت DC)، گشتاور (Torque) و سرعت (RPM) آن توجه کنید. این مشخصات باید با نیاز پروژه شما همخوانی داشته باشند.

۲. انکودر دانکر (Encoder)
وظیفه: انکودر قطعهای است که به موتور متصل میشود و موقعیت و سرعت دقیق شفت موتور را گزارش میدهد. این اطلاعات برای کنترل دقیق حرکت موتور حیاتی هستند.
اهمیت: در پروژههایی که به دقت بالایی نیاز دارید (مثل روباتیک یا تجهیزات پزشکی)، وجود انکودر ضروری است. انکودر به کنترلر کمک میکند تا موتور را با دقت میلیمتری کنترل کند.
۳. کنترلر دانکر (Controller)
نقش اصلی: کنترلر مغز سیستم است. وظیفه آن دریافت فرمانها و تبدیل آنها به حرکت موتور است.
انواع کنترلر: کنترلرها در انواع مختلفی موجود هستند. برخی از آنها ساده هستند و فقط به ولتاژ و جریان موتور را تنظیم میکنند، در حالی که برخی دیگر هوشمند هستند و قابلیت برنامهریزی پیچیده دارند.
پیکربندی: بسیاری از کنترلرهای دانکر دارای پورت USB یا RS-232 برای اتصال به کامپیوتر هستند. با استفاده از نرمافزار مخصوص، میتوانید پارامترهای مختلفی مانند شتاب، سرعت و گشتاور را تنظیم کنید
دانکر موتور ایران علاوه برخدمات نصب موتور دانکر ، تعمیر موتور دانکر را به صورت تخصصی انجام می دهد هدف ما این است که موتور دانکر شما را با استفاده از قطعات اصلی و بالاترین استاندارد، به کیفیت روز اول بازگردانیم.